


 荣誉资质
荣誉资质如图2所示。HEV·ECU根据驾驶员的要求、车辆的状态以及主电池的充电状态,将要使发动机产生的功率作为发动机要求功率,向发动机ECU发出指令。然后由发动机ECU按照HEV·ECU指示的发动机要求功率来控制
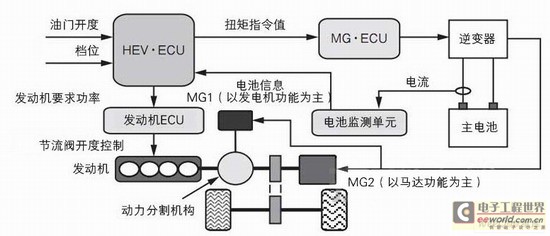
另外,HEV·ECU还会计算出MG1的扭矩和MG2的扭矩,向MG·ECU发出扭矩指令值。在接到指令后,MG·ECU就会通过逆变器来控制MG1和MG2,按照扭矩指令值来输出驱动力。
同时,电池监测单元还会获取主电池的信息(电流、电压、温度),发送给HEV·ECU。HEV·ECU根据这些信息计算出主电池的剩余容量(SOC:STate Of Charge),为使系统达到最佳状态而对充电状态进行控制。
普锐斯这样的HEV在减速时将马达用作发电机,把运动能量转变成电力存储到主电池中。为了回收更多的运动能量,实施对使用摩擦力的机械式制动以及基于发电的再生制动进行分配的控制(图3)。
在电力控制方面,始终监测主电池的容量,根据电池的SOC对充电量及放电量进行管理。主电池在EV行驶时那样将马达用于驱动时进行放电,在旋转时那样将马达用作发电机时被充电(图4)。SOC高时EV行驶的可能性更高,可再生的能量变少。而SOC低时则与之相反。
图5展示了主电池的SOC是如何变化的。主电池的SOC过高的话存在过量充电的不良影响,而过低的话则存在过度放电的不良影响。要想抑制主电池性能的降低,长期确保可靠性,需要限制SOC的使用范围。因此要利用电池传感器始终掌握再生量和放电量,计算出SOC。使用镍氢充电电池的普通HEV一般将SOC的使用范围限制在20~40%左右(SOC在40~60%或40~80%)。
